|
新增指令如下,(仓库内有新旧产品,如果有需要用到新指令的客户,下单时请告知我们出新产品)
下载中心的例子及手册已经更新(名字没更新,但下载的内容更新了,请下载查看)
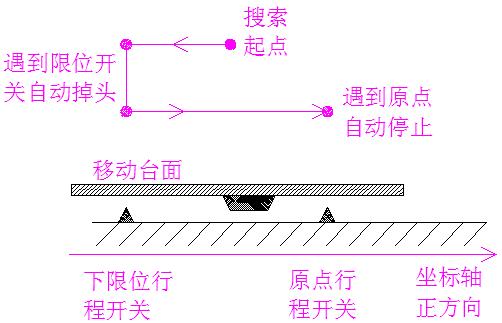
1.AXZO2,原点搜索库指令(含原点开关输入和低限位开关输入),比之前原点搜索指令更方便搜索原点开关。
2.AXCT,单轴位置控制指令计数(本指令不常用,请查看AXCTA指令)此函数功能说明:每一个脉冲输出轴都有一个内部计数器,在执行位置控制指令时,每完成一个位置指令,对应此脉冲输出轴的内部计数器数值会自动加1。此函数用于设置和读取此计数器数值。
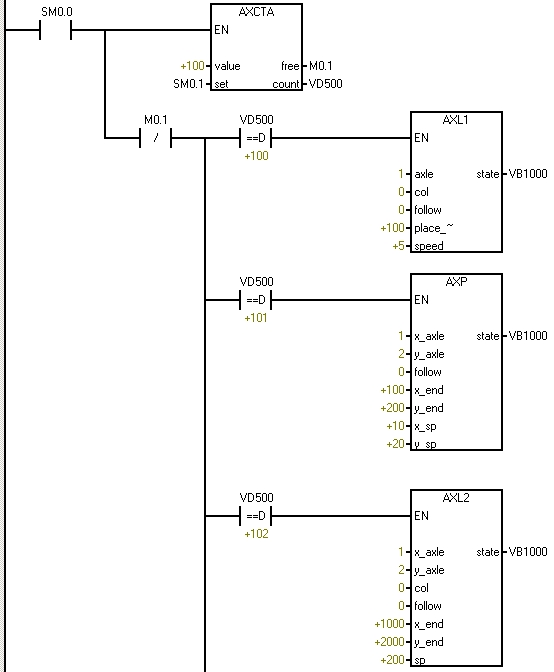
3.AXCTA,位置控制指令计数此函数功能说明:在执行位置控制指令时,每执行完成一个位置控制指令,count输出值将加1;此函数用于设置及显示 count的初始值,并且也可以通过free 来获知是否有位置控制指令正在执行,方便于下一个指令的执行操作。
4.AXSP,速度输出指令,此函数功能说明:控制axle 指向的轴持续输出脉冲,即使超出了绝对坐标值范围也将持续输出脉冲;
如下图,位置控制指令编程非常方便,每执行完一个指令VD500自动加1,M0.1自动清0;当指令正在执行时M0.1又自动置位为1;
位置控制库指令,
PWM、PSP、PPU与位置控制库不能同时控制同一轴
|
库指令名称 |
功能说明 |
|
AXSET |
位置控制启动库指令,轴总控库指令
用于启用或停用脉冲轴的位置控制,用于配置脉冲轴的基本参数,用于显示脉冲轴的基本信息等。
必须要正确执行本库指令后,其他位置控制指令才能正确执行。
新泰阳脉冲输出轴:
轴1:Q0.0为脉冲输出口,Q0.2为方向输出口;
轴2:Q0.1为脉冲输出口,Q0.3为方向输出口;
轴3:Q0.6为脉冲输出口,Q0.7为方向输出口; |
|
AXL1 |
单轴位置控制库指令
控制单个轴按设定的速度,走到终点位置。 |
|
AXP |
两轴快速点定位库指令
控制x 和y 轴按设定速度运动到终点坐标,且终点减速停止。 |
|
AXL2 |
两轴直线插补库指令
控制x 和y 轴从当前坐标直线插补走到终点坐标。 |
|
AXC |
两轴圆弧插补库指令
控制x 和y 轴从当前坐标走圆弧到终点坐标。若当前坐标与终点坐标重叠,将走全圆。 |
|
AXTR |
两轴三角波插补库指令
从当前位置沿x轴做三角波运动到终点坐标。 |
|
AXTRH |
两轴快速三角波插补库指令
从当前位置沿x轴做三角波运动到终点坐标。快速波形方式。 |
|
AXL3 |
三轴直线插补库指令
控制x轴、y轴和z轴从当前坐标直线走到终点坐标。 |
|
AXZO |
原点搜索库指令(本指令不常用,请查看AXZO2指令)
搜索绝对坐标零点。 |
|
AXZO2 |
原点搜索库指令(含原点开关输入和低限位开关输入)
搜索绝对坐标零点。 |
|
AXFO |
跟随运动控制库指令
用于跟随手轮等脉冲输入设备,输出脉冲数。
含电子齿轮变比功能。 |
|
AXCO |
参考坐标设定库指令
用于选择当前坐标系。有绝对坐标,增量坐标,参考坐标1,参考坐标2,四种坐标系供选择,坐标切换方便。 |
|
AXCT |
单轴位置控制指令计数(本指令不常用,请查看AXCTA指令)
此函数功能说明:每一个脉冲输出轴都有一个内部计数器,在执行位置控制指令时,每完成一个位置指令,对应此脉冲输出轴的内部计数器数值会自动加1。此函数用于设置和读取此计数器数值。 |
|
AXCTA |
位置控制指令计数
此函数功能说明:在执行位置控制指令时,每执行完成一个位置控制指令,count输出值将加1;此函数用于设置及显示 count 的初始值,并且也可以通过free 来获知是否有位置控制指令正在执行,方便于下一个指令的执行操作。 |
|
AXSP |
速度输出指令,
此函数功能说明:控制axle 指向的轴持续输出脉冲,即使超出了绝对坐标值范围也将持续输出脉冲; |
简单脉冲输出库指令
|
库指令名称 |
功能说明 |
|
PWM |
PWM输出库指令
此库指令用于控制Q0.0输出PWM脉宽调制波形; |
|
PSP |
速度脉冲输出库指令
此库指令用于控制Q0.0/Q0.1/Q0.6输出 占空比为50:50的脉冲;有加减速功能,可以控制伺服器,变频器,步进电机等。
方便用于多轴同步控制,印刷套色等。 |
|
PPU |
脉冲输出库指令
此库指令用于控制Q0.0/Q0.1/Q0.6输出占空比为50:50的冲;无方向脉冲输出,虽然用位置控制指令可以实现这个功能,但在简单脉冲输出控制场合,使用此指令更加简单方便,这个指令很方便用于冲床间歇送料。 |
注:PWM、PSP、PPU与位置控制库不能同时控制同一轴。
称重与PID库指令
|
库指令名称 |
功能说明 |
|
WGSET |
称重设定库指令
用于把称重模块测量值转为实际重量; |
|
TPID |
温度PID控制库指令
用于温度PID调节,即可以用于加热控制,也可以用于冷却控制。 |
|
GPID |
常规PID控制库指令
用于普通PID调节,例如:恒压供水,速度跟踪,涨力控制。 |
传送与计算库指令
|
库指令名称 |
功能说明 |
|
MOVBH |
字节高速传送库指令
用于字节块高速传送, |
|
CALW |
三角波计算库指令
已知三角波的第一第二波峰或波谷坐标(必须是相连的波峰波谷坐标),求波形上任意一点x轴坐标对应的y轴坐标。 |
|